ITS ePrimer
Module 13: Connected Vehicles
Authored by Kyle Garrett, Synesis Partners LLC, Overland Park, KS, USA
October 2021
Table of Contents
Purpose
The expansion of connectivity between vehicles, between vehicles and transportation infrastructure, and with networks offers a variety of challenges and opportunities to the transportation system and intelligent transportation system (ITS) infrastructure. The purpose of this module is to describe the development and eventual deployment of connected vehicles (CVs) within the surface transportation system with an emphasis on ITS. The module describes the current and emerging connected ecosystem, technologies, demonstrations, and challenges of deploying infrastructure in support of connected vehicle applications. This description is a snapshot overview of rapidly-developing programs and technologies and provides links for more information where available.
This module does not address the emerging development and deployment of automated vehicles (AV) or connected and automated vehicles (CAV). AVs are any vehicles equipped with driving automation technologies, at increasing levels of completeness. CAVs add connectivity to driving automation and may take advantage of CV concepts described in this module, although the specifics of those interactions are not yet defined.
Return to top ↑
Objectives
Users of this module will be exposed to and develop an understanding of the following:
- The connected ecosystem, including CVs, the connected infrastructure, and communications
- The technological evolution and programmatic history of CVs as they have begun to be deployed within the transportation system, including the roles of government and industry stakeholders
- Initiatives and programs in development of the connected ecosystem
- Benefits and challenges of development and deployment
Return to top ↑
Introduction
Communications have always been a fundamental means of enabling safety and mobility in transportation. Drivers have received visual information from other drivers, their vehicles, road signs, pavement markings, traffic control devices, and emergency services personnel ever since they appeared on the roadways. The flow of information is now being vastly increased by the availability of digital wireless communications between vehicles, ITS devices, and network services. Vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), vehicle-to-network (V2N) and vehicle-to-everything (V2X) communications are enabling new data exchanges and applications that can increase the safety and mobility performance of the system.
These developments in CV technologies and applications have the potential to serve the public good with improvements in safety, mobility, operations, and environmental impacts of travel on the nation's roadways.
- Crashes can be dramatically reduced when vehicles can sense traffic controls and communicate the events and hazards around them.
- Mobility can be improved when drivers, transit riders, and freight managers have access to up-to-date, accurate, and comprehensive information on travel conditions and options.
- Mobility can be further improved when system operators, including roadway agencies, public transportation providers, and port and terminal operators, have actionable information and the tools to affect the performance of the transportation system in real time.
- Transportation system management and operations can be enhanced when system operators can continuously monitor the status and direct the various assets under their control.
- Environmental impacts of vehicles and travel can be reduced when travelers can make informed decisions about modes and routes, and when vehicles can communicate with the infrastructure to enhance fuel efficiency by avoiding unnecessary stops.
Return to top ↑
The Connected Vehicle Ecosystem
The connected ecosystem enables improvements in safety, mobility, operations, and environmental impacts by sharing situational awareness data and alerts among vehicles, infrastructure, pedestrians, and other travelers. Figure 1 illustrates the concept of communication and cooperation among multiple modes and vehicle types as they interact across the road network. Communication systems operating in the environment enable data sharing and may provide local computing power for processing sensed data into alerts. Advisories and alerts derived from the awareness data improve drivers' ability to respond to situations and reduce the likelihood of crashes and improve mobility. Vehicle systems can use the same data sets to automate some safety functions and provide enhanced advisories and warnings.
This section provides a high-level view of the connected ecosystem and its components, each of which is described in more detail in subsequent sections on the Architecture Reference for Cooperative Transportation and on Connected Ecosystem Technologies. The concepts and components are also described in the 2020 Connected Vehicle Deployment Environment summary from the Cooperative Automated Transportation (CAT) Coalition.1
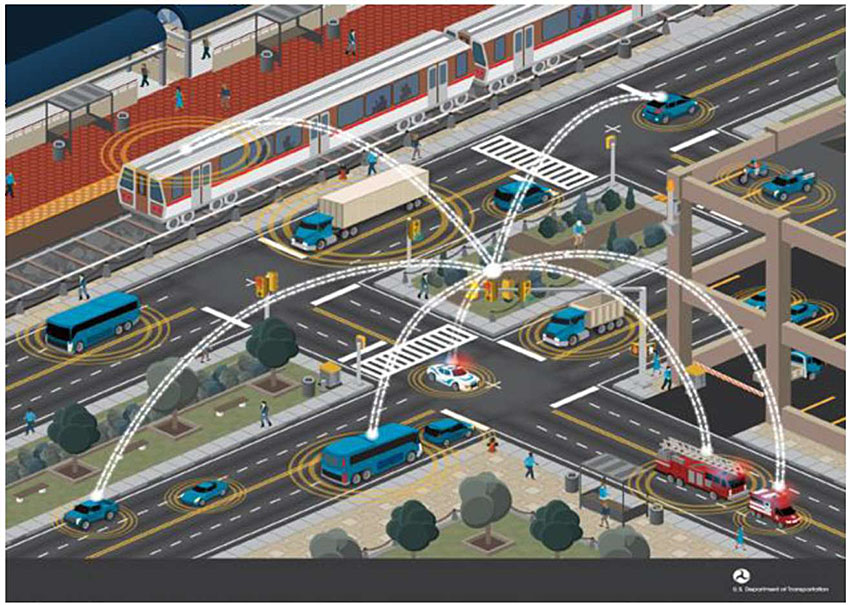
Figure 1. Connected Vehicle Ecosystem. Source: USDOT ITS JPO.
Connected Vehicles
CVs, whether passenger, commercial, or transit vehicles, move through the connected ecosystem while exchanging messages with other CVs and the infrastructure. Information about a vehicle's location, speed, and heading, for example, could be provided from a CV to other CVs in its vicinity. A CV might then use information from other vehicles to infer their paths and compute risk of conflicts between them. CVs may also receive information from connected infrastructure about conditions in the vicinity. A traffic signal, for example, could provide information about its signal phase and timing (SPaT), which might be used by a CV to warn its driver of a potential signal violation.
A broader view of the connected ecosystem suggests that users could include pedestrians, bicyclists, scooter riders, and other users sharing the roadways and roadsides. Users would communicate with CVs and connected infrastructure through their mobile devices or units embedded in their personal bicycles or scooters. Location and movement information from these users can enable vehicles and infrastructure to assess potential conflicts, create advisories and warnings, and potentially change their intended actions. The non-CV users could get advisories and warnings on their mobile devices of, for example, approaching vehicles or signal changes.
Connected Infrastructure
Connected infrastructure broadcasts information about roadway conditions and traffic controls to CVs and other users in its vicinity, and collects information about CV and user movements along and near the roadways. Its network connections enable infrastructure to feed traffic information from CVs and users to traffic management centers (TMC) and to provide traveler information to those users and vehicles. Connected infrastructure consists of roadside equipment (RSE) providing the wireless connectivity and other devices providing information to or receiving data from the CVs—traffic signals, fixed sensors, and roadway lighting, for example. Roadside Assistance Equipment may also broadcast messages providing reference information to CVs, such as maps and corrections for global positioning system (GPS) receivers.
Communications
Wireless communications are the essential means by which data flow between and among the CVs, infrastructure, and other users in the connected ecosystem. Communications in this context consist of both the enabling wireless media and the messages containing the data. The messages are designed to be usable across and not dependent on the particular medium used in a setting or application. The data and messages are generally defined in standards developed and managed by standards developing organizations (SDO) such as the Institute of Electrical and Electronics Engineers (IEEE), SAE International (SAE), and the Institute of Transportation Engineers (ITE).
Benefits of Connectivity
According to the National Highway Traffic Safety Administration (NHTSA), motor vehicle crashes accounted for 33,654 deaths in 2018.2 The application of connected vehicle technologies is expected to offer significant near-term opportunities for crash reductions. Research conducted by the Volpe National Transportation Systems Center for NHTSA found that deployment of connected vehicle systems and the combined use of V2V and V2I applications have the potential to address 81 percent of unimpaired driver crashes in all vehicle types (i.e., cars and heavy vehicles).3 A 2015 study for the United States Department of Transportation (USDOT) ITS Joint Program Office (JPO)4 compiled estimates of beneficial impacts, shown in Table 1, from safety analysis, field testing, simulations, and combinations thereof.
Table 1. Estimated Impacts of Connected Vehicle Applications in Four V2I Research Programs
| Impact Area |
Estimated Impacts |
Relevant Applications* |
Program |
| Safety |
Crash population targeted by V2I safety applications at intersections includes up to 575,000 crashes (involving more than 5,100 fatalities) annually** |
PCW, RLVW, SSGA, SSVW |
V2I Safety |
| Safety |
Crash population targeted by V2I safety applications at curves includes up to 169,000 crashes (including 5,000 fatal crashes) annually** |
CSW |
V2I Safety |
| Safety |
Reduction of crashes by up to 25% during winter weather due to weather traffic management applications on freeways*** |
WRTM-VSL |
RWM |
| Safety |
Reduction in speed variations between freeway segments by 18%-58% and within freeway segments by 10%-47%, resulting in fewer rear-end crashes**** |
SPD-HARM |
DMA |
| Safety |
Fewer instances of hard braking and up to 89% reduction in maximum deceleration in incident zones*** |
INC-ZONE |
DMA |
| Mobility |
Reduction in travel time on arterial corridors by 6% to 27% when combined multimodal traffic signal system is implemented*** |
I-SIG, FSP, TSP |
DMA |
| Mobility |
Reduction in travel time for transit vehicles by up to 10% with priority*** |
TSP |
DMA |
| Mobility |
Reduction in travel time by up to 23% and number of stops by up to 15% for emergency vehicles*** |
INC-ZONE |
DMA |
| Mobility |
Reduction in average network-wide delay of up to 14% due to alerts to incident zone workers*** |
INC-ZONE |
DMA |
| Mobility |
Annual travel time reductions of 246,000-740,000 hours when an integrated corridor management decision support system with eco-capabilities is implemented**** |
Eco-ICM |
AERIS |
| Mobility |
Reduction in travel time on freeways by 33% to 42% when cooperative adaptive cruise control, and speed harmonization are optimized for the environment**** |
Eco-Lanes |
AERIS |
| Environmental |
Fuel savings of 2%-22% when signal operations and freeway lane management are optimized for the environment**** |
Eco-Lanes, Eco-Signal Operations |
AERIS |
| Environmental |
Annual fuel savings of 323,000-981,000 gallons when an integrated corridor management decision support system with eco-capabilities is implemented**** |
Eco-ICM |
AERIS |
| Environmental |
Annual mobile emissions savings of 3,100-9,400 tons when an integrated corridor management decision support system with eco-capabilities is implemented**** |
Eco-ICM |
AERIS |
* CSW = Curve Speed Warning; ECO-ICM = Eco-Integrated Corridor Management; FSP = Freight Signal Priority; INC-ZONE = Incident Scene Work Zone Alerts for Drivers and Workers; I-SIG = Intelligent Traffic Signal System; PCW = Pedestrian in Signalized Crosswalk; RLVW = Red Light Violation Warning; SPD-HARM = Dynamic Speed Harmonization; SSGA = Stop Sign Gap Assist; SSVW = Stop Sign Violation Warning; TSP = Transit Signal Priority; WRTM-VSL = Weather Responsive Traffic Management - Variable Speed Limits
** Precursor safety analysis finding
*** Results based on field testing
**** Result based on simulation/analytical study
Source: USDOT ITS JPO
The 2019 Urban Mobility Report prepared by the Texas A&M Transportation Institute5 indicates that congestion in 494 urban areas during 2017 accounted for 8.8 billion hours of travel delay and 3.3 billion gallons of wasted fuel, at a cost of $179 billion annually. The cost to the average auto commuter was $1,080 in 2017. While there is no comprehensive analysis of the potential impacts of connected vehicle systems on urban congestion, it can be assumed that the focus of certain applications on reducing travel delays, such as reducing congestion by mitigating traffic incidents, will ensure that benefits will accrue in this area.
Reduction of pollutants and greenhouse gases (GHGs) produced by surface transportation through reductions in fuel consumption, idling, and vehicle miles of travel is a major goal of some connected vehicle applications. While sales of electric vehicles are increasing in the United States, vehicles with internal combustion engines will be part of the fleet for many years even if their manufacture is phased out. These engines produce emissions that include pollutants and greenhouse gases.6 The principal pollutants of nitrous oxides, sulfur oxides, carbon monoxide, and particulate matter are among the causes of pulmonary diseases and premature death. Data suggest that children are especially vulnerable to air-quality-induced asthma; a leading cause of hospitalization of children according to the Centers for Disease Control and Prevention.7 GHGs, including carbon dioxide, methane, and nitrous oxide, are not as directly harmful as pollutants, but could contribute significantly to climate change.
Connected vehicle deployment will also benefit public sector operations. A 2014 National Cooperative Highway Research Program (NCHRP)8 study found that quantifiable benefits of CV deployment would include the following:
- Reduced costs of crash response and clean-up cost reduction
- Reduced need for traveler information infrastructure
- Reduction of infrastructure required to monitor traffic
- Lower cost of pavement condition detection
- Energy savings for adaptive lighting
Other non-quantifiable benefits could include the following:
- Work zone safety improvements and crash reduction
- New data sources for traffic and planning studies, with subsequent improved long-term planning and program management
- More timely agency performance analysis and response
- DOT vehicle fleet insurance reduction
Historic Context
The Federal Highway Administration (FHWA) started an Automated Highway System (AHS) program in 1992, as part of its larger Intelligent Vehicle-Highway Systems (IVHS) initiative. Its intent was to develop highway and vehicle prototypes from which future such automation systems could be developed.9 AHS concepts were demonstrated in 1997 in San Diego, California10 and Houston, Texas in 1997-98.11
Development of CV capabilities in government and industry was accelerated by the 1999 Intelligent Transportation Society of America (ITS America) petition to the Federal Communications Commission (FCC) to allocate 75 Megahertz (MHz) of spectrum in the 5.9 Gigahertz (GHz) band for ITS applications. The rest, as they say, is history.12
1999 - The FCC allocate 75 MHz of spectrum in the 5.9 GHz band for ITS applications enhancing safety and mobility
2003 - FCC publishes licensing and service rules for the 5.9 GHz band.
2003 - USDOT launches the Vehicle-Infrastructure Integration (VII) program to investigate connected vehicle applications.
2005 - USDOT initiates a VII proof-of-concept demonstration program.
2005 - An Integrated Vehicle-based Safety Systems (IVBSS) initiative begins looking at integrated safety systems for light vehicles and trucks.
2006 - USDOT partners with the Crash Avoidance Metrics Partnership (CAMP), a pre-competitive association of automotive original equipment manufacturers, for development and testing of prototype V2V safety applications.
2006 - FCC issues a Memorandum Opinion and Order on the designation of channels within the Safety Band for V2V and V2I intersection safety applications.
2009 - Google starts its Self-Driving Car project.
2011 - The first public demonstration of CV applications is held at the 18th ITS World Congress in Orlando, Florida.
2012 - USDOT launches the Safety Pilot Model Deployment demonstrating V2V communications in Ann Arbor, Michigan.
2014 - General Motors announces semi-autonomous driving features and V2V communication capability in some 2017 Cadillacs.
2014 - USDOT issues an Advanced Notice of Rulemaking for V2V communication technology for light vehicles, seeking public input to regulation to eventually require V2V devices in new light vehicles. A rulemaking decision is postponed.
2015 - USDOT announces its Connected Vehicle Pilot Deployment awards to New York City DOT, the Tampa Hillsborough Expressway Authority, and Wyoming DOT.
2016 - USDOT announces its Smart City Challenge award to the City of Columbus, Ohio, incorporating CV applications.
2019 - FCC initiates a notice of proposed rulemaking to reallocate the lower 45 MHz of the 5.9 GHz ITS band for unlicensed use and revisit the dedication of the upper 30 MHz for Dedicated Short-Range Communications (DSRC), opening it to Cellular Vehicle to Everything (C-V2X) operations.
2020 - FCC issues a further notice of proposed rulemaking to propose rules for unlicensed use in the lower 45 MHz of the 5.9 GHz band and to transition all ITS operations in the revised 30 MHz ITS band to C-V2X.
Updated information on communications technologies in the 5.9 GHz band may be found on the USDOT’s Safety Band website13 or Federal Communication Commission online docket resources.
Return to top ↑
CV Applications
Federal, State, and industry CV programs have been working on the identification, demonstration, and deployment of applications throughout their history. Following effective systems engineering principles, CV application concepts and specifications have set the direction for CV technology development. Lists of potential applications have been developed and combined over time to those identified in Table 2.
Table 2. Connected Vehicle Applications
V2I Safety
Red Light Violation Warning
Curve Speed Warning
Stop Sign Gap Assist
Spot Weather Impact Warning
Reduced Speed/Work Zone Warning
Pedestrian in Signalized Crosswalk
Warning (Transit)
V2V Safety
Emergency Electronic Brake Lights (EEBL)
Forward Collision Warning (FCW)
Intersection Movement Assist (IMA)
Left Turn Assist (LTA)
Blind Spot/Lane Change Warning (BSW/LCW)
Do Not Pass Warning (DNPW)
Vehicle Turning Right In Front of Bus Warning (Transit)
Agency Data
Probe-based Pavement Maintenance
Probe-enabled Traffic Monitoring
Vehicle Classification-based Traffic Studies
CV-enabled Turning Movement & Intersection Analysis
CV-enabled Origin-Destination Studies
Work Zone Traveler Information
|
Environment
Eco-Approach and Departure at Signalized Intersections
Eco-Traffic Signal Timing
Eco-Traffic Signal Priority
Connected Eco-Driving
Wireless Inductive/Resonance Charging
Eco-Lanes Management
Eco-Speed Harmonization
Eco-Cooperative Adaptive Cruise Control
Eco-Traveler Information
Eco-Ramp Metering
Low Emissions Zone Management
AFV Charging / Fueling
Information
Eco-Smart Parking
Dynamic Eco-Routing (light vehicle, transit, freight)
Eco-ICM Decision Support System
Road Weather
Motorist Advisories and Warnings (MAW)
Enhanced MDSS
Vehicle Data Translator (VDT)
Weather Response Traffic Information (WxTINFO)
|
Mobility
Advanced Traveler Information System Intelligent Traffic Signal System (l-SIG)
Signal Priority (transit, freight)
Mobile Accessible Pedestrian Signal System (PED-SIG)
Emergency Vehicle Preemption (PREEMPT)
Dynamic Speed Harmonization (SPD-HARM)
Queue Warning (Q-WARN)
Cooperative Adaptive Cruise Control (CACC)
Incident Scene Pre-Arrival Staging Guidance for Emergency Responders (RESP-STG)
Incident Scene Work Zone Alerts for Drivers and Workers (INC-ZONE)
Emergency Communications and Evacuation (EVAC)
Connection Protection (T-CONNECT)
Dynamic Transit Operations (T-DISP)
Dynamic Ridesharing (D-RIDE)
Freight-Specific Dynamic Travel Planning and Performance
Drayage Optimization
Smart Roadside
Wireless Inspection
Smart Truck Parking
|
Source: USDOT ITS JPO, https://www.its.dot.gov/pilots/cv_pilot_apps.htm
Vehicle-to-infrastructure safety applications use information provided by infrastructure system to warn vehicles about potentially unsafe conditions or operations.
Vehicle-to-vehicle safety applications exchange information between and among vehicles to warn of potential vehicle conflicts.
Agency data applications use data collected by vehicle sensors to facilitate agency traffic monitoring, planning, and maintenance.
Mobility applications collect and aggregate information from vehicles to facilitate movement across the roadway network, at intersections, around incidents, and through work zones; enhance emergency response; facilitate transit operations; and assist freight movement.
Environmental applications generally build on mobility applications to reduce the environmental impacts of vehicle and fleet operations.
Road weather applications collect and process weather-related data from vehicles to provide weather-responsive warnings and winter road maintenance decision support.
Smart Roadside applications assist freight operations with direct V2I data exchanges.
Example Application - Red Light Violation Warning
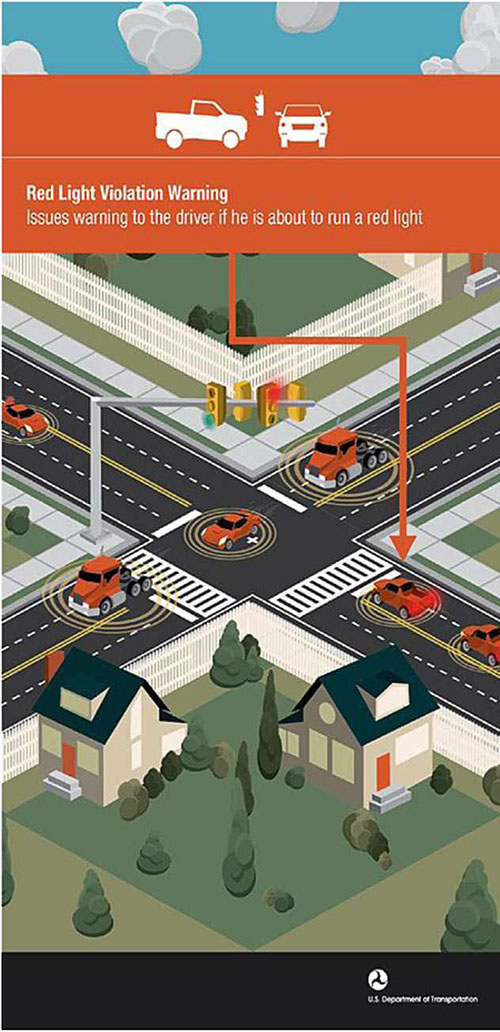
Figure 2. Red Light Violation Warning Application. Source: USDOT ITS JPO
Red light violation warning (RLVW) is a priority V2I safety application. It has the potential to reduce the likelihood of serious crashes and can be deployed in all vehicle types.
In the RLVW application, as shown in Figure 2, a CV approaching a connected intersection receives messages describing the intersection geometry, signal phase and timing, and real-time position corrections (if available). The application in the vehicle uses its position, speed, and heading to make a determination relative to intersection geometry and signal timing as to whether it can proceed through the intersection without violating the red signal. A warning is shown to the driver if a violation is likely.
Return to top ↑
Architecture Reference for Cooperative and Intelligent Transportation
The National ITS Reference Architecture, now known as the Architecture Reference for Cooperative and Intelligent Transportation (ARC-IT),14 combines the previous National Intelligent Transportation Systems Architecture and the Connected Vehicle Reference Implementation Architecture (CVRIA). It describes the integration of CV systems with infrastructural ITS in a set of four architectural views: Enterprise, Functional, Physical, and Communications. Connected vehicle applications are incorporated among the service packages defined by ARC-IT.
The connected ecosystem is represented in the architecture by functions spread among 48 physical objects and 372 functional objects representing travelers, vehicles, field infrastructure, communications and back office services including the following:
- Back office centers and services, such as transportation management centers and cooperative ITS credentials management systems
- Field objects and services, such as CV RSE and traffic signal systems
- Vehicles, objects, and services, such as the vehicles, services specific to vehicle types, and their CV on-board equipment
- Personal objects and services, such as personal information devices and personal emergency notification
- Communications objects and services, such as on-board equipment (OBE) and services for managing communications from that equipment
Architecture Reference for Cooperative and Intelligent Transportation is implemented and available for system developers and planners in two software packages. The Regional Architecture Development for Intelligent Transportation (RAD-IT) tool supports development of regional and project ITS architectures. The Systems Engineering Tool for Intelligent Transportation (SET-IT) tool provides support for developing CV project architectures.
Return to top ↑
Connected Ecosystem Technologies
Connected Vehicle Technologies
Operation and data exchanges among CVs and with infrastructure in a connected ecosystem require both physical and informational technologies to be deployed to the CV. Many of these are common features in modern vehicles, but become essential to CV applications. As shown in Figure 3, these can be grouped broadly into location technologies, vehicle sensors, on-board equipment for communications, and the driver-vehicle interface features for connected applications.
Determining vehicle location is critical to safety and most mobility applications. Vehicle location and time reference are provided by a global navigation satellite system (GNSS). In the United States, GNSS location services are provided by the Global Positioning System (GPS) operated and maintained by the US Air Force.15 Positions provided by GPS may be locally corrected by fixed Differential GPS (DGPS) to account for reduced satellite visibility in dense urban canyons or mountainous areas. Vehicle speed and trajectory may also be derived from the location and time data. Global Positioning System equipment in CVs consists of the GPS receiver and an antenna.
On-board vehicle sensors and controls provide data for use in the vehicle's own electronic control units, but the data may also be sent and used by CV applications outside the vehicle. Sensors and controls with data valuable to CV applications are generally monitoring the vehicle's kinematics (speed, acceleration, and direction of travel), the roadway (vertical accelerations and braking effectiveness), or its operating environment (ambient temperature, precipitation, and lighting). Sensors and controls providing these data may include the following:
- Accelerometers
- Steering angle
- Wheel speed
- Braking actuation
- Headlights
- Windshield wipers
- Ambient air temperature
Data from these devices are shared among vehicle systems on its controller area network (CAN) bus. Access to the data from other on-board devices may come through a dedicated CAN bus connection or through an on-board diagnostics (OBD) port.
On-board equipment (OBE) provides vehicular access to wireless communications with other vehicles, infrastructure, and networks. An OBE provides access through one or more wireless media and communications spectrum bands. The OBE accesses vehicle data from the CAN bus, packages the data in message formats appropriate to the communication media type, and broadcasts the messages through its antenna. The OBE may also provide processing and data storage for on-board components of CV applications.
Connected vehicle applications may also need a driver-vehicle interface (DVI) for providing advisories and warnings. The DVI may be an aftermarket device such as a tablet that is mounted in the vehicle operator's view, or may be more fully integrated with the vehicle's operator displays and controls.
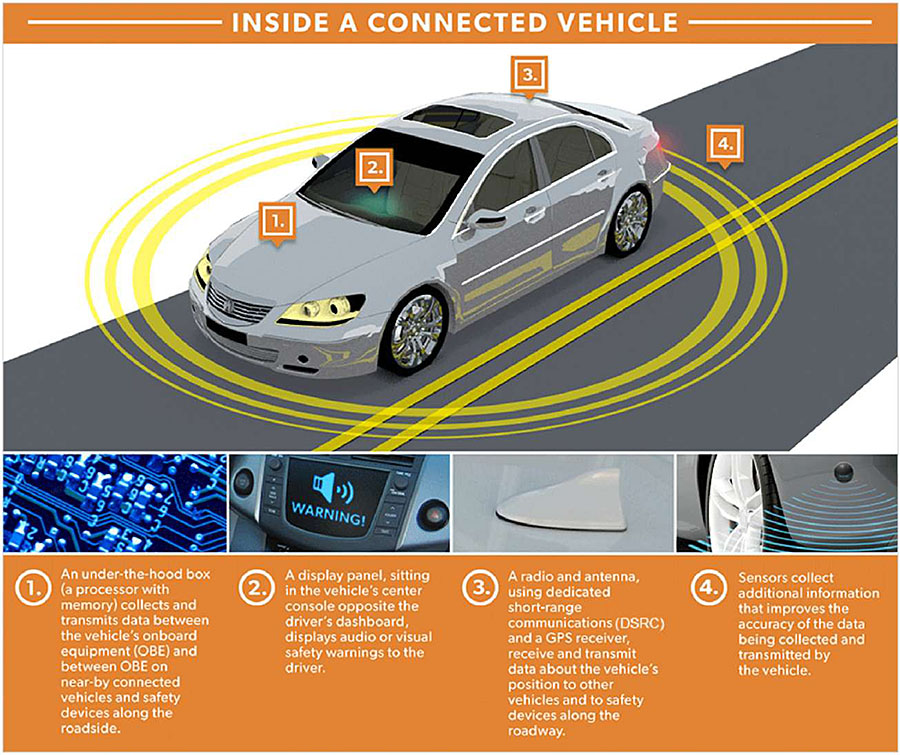
Figure 3. Inside a Connected Vehicle. Source: USDOT ITS JPO, https://www.its.dot.gov/cv_basics/cv_basics_car.htm
Connected Infrastructure Technologies
Communications between vehicles and roadway infrastructure are critical to many CV applications. Connected infrastructure maintains existing ITS functionality to support non-connected vehicles and their drivers, and is expanded to support CV applications and eventually AVs. The connected infrastructure includes field components at the roadside and systems in the back office.
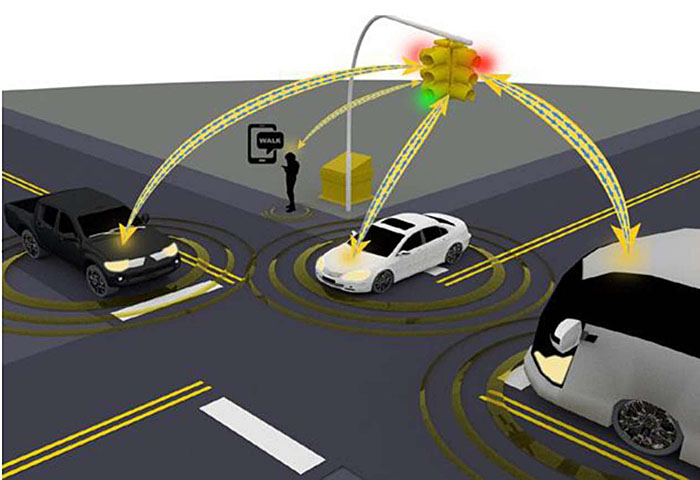
Figure 4. Connected Infrastructure. Source: USDOT ITS JPO
Roadside ITS Technologies
Traffic signal controllers are located at intersections to monitor and control traffic signal operations. These locations are ideally suited for connected infrastructure interactions with passing CVs. As illustrated in Figure 4, they can process and broadcast traffic operations data, such as SPaT, that can be used in many CV intersection safety and mobility applications, including the following:
- Red Light Violation Warning (RLVW)
- Multi-Modal Intelligent Traffic Signal Systems (MMITSS)16
- Intelligent Traffic Signal System (ISIG)
- Transit Signal Priority (TSP)
- Mobile Accessible Pedestrian Signal System (PED-SIG)
- Emergency Vehicle Preemption (PREEMPT)
- Freight Signal Priority (FSP)
Traffic signal controllers may require hardware or, at a minimum, software upgrades to support applications needing real-time SPaT data.
Other ITS field devices and controllers may be upgraded to support specific CV applications at locations other than intersections. Dynamic message signs (DMS) can be connected to provide local broadcast of traveler information for in-vehicle displays. Ramp metering systems and controllers located along freeway corridors could be enabled to provide in-vehicle metering indications and to support mobility applications such as SPD-HARM and safety applications such as queue warnings (Q-WARN).17 Environmental sensor stations (ESS) monitor weather and road conditions that are needed for developing motorist advisories and warnings (MAW).
Roadside Equipment for Communications
Roadside equipment (RSE) for wireless communications provides the infrastructure interface for V2I communications. Independent of the particular wireless spectrum and media protocols used for the communications, the RSE consists of a radio, antenna, processor, and interfaces to other local devices (generally through a local Ethernet connection). It generally will also interface with an agency or commercial network for backhaul to central ITS services and data.
Roadside equipment are sold as commercial products by several technology vendors using multiple wireless media options. The USDOT tested devices and established a Research Qualified Products List (RQPL) as a means of accelerating acceptance and deployment. The testing was based on a standard Roadside Unit (RSU) Specification,18 v4.1 of which was developed by the USDOT's Saxton Transportation Operations Laboratory for DSRC RSEs in 2016. It contains a general description and requirements for RSE configuration, operations, and interfaces.
V2X Hub
Data in the connected ecosystem is shared among many components and services, each with its own native data structures and formats. Data translation between these formats is a fundamental need and challenge for CV applications. The V2X Hub is an open-source software package developed by USDOT for CV data translation, aggregation, and dissemination.19 The translations generally include messages to and from CV and ITS standards. It can, for example, receive SPaT information from a traffic signal controller in the National Transportation Communications for ITS Protocol (NTCIP) 1202 format, translate the data into an SAE J2735 SPaT message, and forward the message to an RSE for transmission to CVs.
The V2X Hub can be run on most Linux-based computers and provides flexibility in CV application deployments. Many CV applications can benefit from receiving and processing data from vehicles at roadside locations. These network-edge deployments may reduce backhaul network traffic and application latencies.
Center Systems and CV Data Backhaul
Backhaul communications are not specifically required by all CV applications. They enable applications to access cloud computing resources and agency center systems for processing that is beyond the scale available on field devices. Agency applications, such as probe-enabled traffic monitoring, for example, may require a backhaul network interface to roadside components for collecting CV location and speed data. A work zone traveler information application would need that access for sending messages through RSEs to passing CVs.
Center systems within an ITS architecture will generally be users of CV data from the field and providers of traveler information processed from CV data and other ITS sources. Traffic control systems and advanced traffic management systems (ATMS), for example, may integrate location and speed data from CVs with traditional vehicle detection stations and TMC camera networks. Data from fixed ESS and road weather information systems (RWIS) can be fused with environmental data from CVs to provide denser data sets.
Agencies pursuing these field-to-center network connections will need to be especially attentive to network security and firewalls. Roadside equipment on an agency network edge are new network access points with their own security risks.
Communications, Messaging, and Standards
Although the 1999 FCC spectrum allocation for ITS safety and mobility applications reserved the 5.9 GHz band for DSRC, the use of that band for particular communications technologies is under FCC review as of 2020. Updated information on communications technologies in the 5.9 GHz band may be found on the USDOT's Safety Band website20 or Federal Communication Commission online docket resources. Connected vehicle communications are possible and have been demonstrated over a variety of wireless media. The criteria for what media are applicable for a given application are dominated by the latency and potential data throughput (bandwidth) with each medium.
Dedicated Short-Range Communications (DSRC)
Dedicated Short-Range Communications (DSRC) refers broadly to a set of standards and technologies developed in response to the 1999 FCC allocation of 75 MHz of spectrum in the 5.9 GHz band for ITS applications enhancing safety and mobility. Dedicated Short-Range Communications uses a variant of Wi-Fi radio technologies adapted for vehicular environments. A family of IEEE standards specifies DSRC radio protocols for wireless access in vehicular environments,21 security,22 network services,23 and multi-channel operations.24
Dedicated Short-Range Communications is a proven technology uniquely appropriate for low-latency V2V and V2I safety applications. Data can be transmitted as often as 10 times per second with a nominal range of 300 meters. Privacy is built into the protocols and standards such that vehicle location is not intended to be recorded or tracked. Benefits of DSRC technology include the following:
- Low cost of radios based on Wi-Fi chip sets produced in quantity
- High reliability
- High data rates to support multiple message types and applications
Challenges for DSRC technologies include the following:
- Requiring both parties in V2V and V2I applications to be compatibly equipped
- Requiring a dedicated security infrastructure
3G/4G/LTE Cellular Networks
Standard 3G, 4G, and 4G Long-term Evolution (LTE) cellular networks have been used in deploying some CV applications with a tolerance for high (multi-second) communications latency. These generations of cellular communications have not been demonstrated to be sufficiently fast for safety applications but may be appropriate for traveler information applications. Benefits of cellular technology include the following:
- Wide availability of commercial networks, with some limitations in rural areas
- Wide availability in personal devices and in vehicles
- Proven utility in routing and mobility applications
Cellular V2X
Cellular V2X (C-V2X) is an extension of cellular technology that adds direct V2V and V2I communications to the network modes used by handsets around the world. The V2V and V2I communications are an adaptation of earlier LTE Direct connection technology for vehicular applications.25 The FCC has approved C-V2X demonstration operations in the 5.9 GHz band alongside DSRC.
Cellular V2X defines two complementary transmission modes. Direct communications are independent of the cellular network, operate in the 5.9 GHz band, and are intended to serve low latency V2V, V2I, and vehicle-to-person (V2P) safety applications. V2N communications operate in the mobile operator's licensed spectrum and are intended for applications not requiring low latency.
Direct V2V, V2I, and V2P communications are provided by a new PC5 interface. PC5 builds on the LTE Direct device-to-device design with enhancements for high speeds (mitigating Doppler effects), high density, improved synchronization, and low latency. PC5 connections have a range of hundreds of meters and operate both in and out of cellular coverage areas.
Vehicle to network communications are provided using LTE to broadcast messages from a V2X server on the cellular network to vehicles. Vehicles can also send messages to a server on the network as part of a CV application. This approach leverages existing cellular wide area network communications for latency tolerant use cases such as providing traveler information. It also provides a path for advancement as 5G cellular communications replace LTE and previous cellular technologies.
Satellite Communications Services
Satellite communications for vehicular applications have been demonstrated over a long period in commercial applications such as early OnStar® system and SiriusXM® radio. They have also been deployed in the Wyoming DOT CV Pilot demonstration to provide traveler information in areas out of range of DSRC RSEs and without cellular coverage.26 The predominant benefit of satellite communications is wide availability, even in rural areas; the major limitations include data bandwidth less than cellular or DSRC options and relatively expensive and limited data bandwidth for uplink from vehicles.
Messaging Standards
Messaging standards beyond those embedded in the communications media are critical for ensuring interoperability of applications among connected ecosystem devices and users. These standards need to respect the requirements of the applications for which the messages are being developed and sent. They need to address the content, formatting, and exchange protocols and they need to be applicable to or translatable for the communications medium used for the data exchange.
Government and industry cooperation working through standards development organizations has developed a core set of messages to enable CV applications. For the connected vehicle ecosystem, the data representations are defined in the SAE J2735 V2X Communications Message Set Dictionary.27 This standard was originally developed specifically for DSRC applications, but the 2020 version is intended to be independent of the underlying communications protocols. Message sets defined in the standard include the following:
- Basic Safety Message (BSM), for information from a vehicle describing its position, speed, heading, and state. This message is used in many safety applications.
- Emergency Vehicle Alert (EVA), for warnings for emergency vehicles operating in the vicinity.
- Map Data (MAP), describing intersection, roadway, and curve geometries.
- Signal Phase and Timing (SPAT), used in intersection conflict avoidance and mobility applications.
- Real-time position correction in a standard Radio Technical Commission for Maritime Services (RCTM) format.
- Traveler Information (TIM), providing advisories and road sign information.
Performance requirements providing bases for the messaging and dictionary are described in a set of supporting documents. These documents align with CV applications and relate to multiple message sets in the SAE J2735 dictionary. Following the SAE J2735 pattern, these requirements are intended to apply to all technologies used for V2X applications. The SAE J2945 documents include both issued and works in progress, including the following:
- Dedicated Short Range Communication (DSRC) Systems Engineering Process Guidance for SAE J2945/X Documents and Common Design Concepts™,28 upon which the other documents in the series are based.
- Dedicated Short Range Communications (DSRC) Performance Requirements for V2V Safety Awareness29
- Requirements for Road Weather Applications30
Cyber Security
A broad view of cyber security measures in support of CV applications needs to address potential threats to the vehicles, infrastructure, and communications. Each of these has its own challenges based on access, types of potential attacks, and functional vulnerabilities.
- Vehicle cyber security focuses on preventing access to vehicle systems and components
- Infrastructure cyber security focuses on protecting against threats to roadside equipment and systems
- V2X communications cyber security focuses on ensuring trust in communications among vehicles and with infrastructure
Vehicles and infrastructure have cyber security threats and countermeasures independent of CV applications that are beyond the scope of this primer. For example, the NCHRP 03-127 study of "Cybersecurity of Traffic Management Systems"31 provides guidance on mitigating risks of cyber-attacks on ITS field devices ranging from traffic signal controllers to road weather information systems, including V2I roadside units. Cyber threats to V2X communications and messaging nonetheless have attack vectors and countermeasures specific to the CV ecosystem.
Vehicle-to-everything communications security is founded on the Security Credential Management System (SCMS). An SCMS Proof-of-Concept (POC) was developed by USDOT to support federally-funded V2X-related research and pilots. The SCMS POC used a Public Key Infrastructure-based approach that employed highly-innovative methods of encryption and certificate management to facilitate trusted communication. Authorized system participants used digital certificates issued by the SCMS POC to authenticate and validate the safety and mobility messages that form the foundation for connected vehicle technologies. To protect the privacy of vehicle owners, these certificates contained no personal or equipment-identifying information but served as system credentials so that other users in the system could trust the source of each message. Each device or user also had a multitude of certificates that the device constantly altered to preserve privacy. Commercial SCMS services have become readily available since the POC program and are being used in IOO CV application deployments.
Return to top ↑
CV Initiatives and Programs
Federal, state, and local agencies, university researchers, consultants, and private industry have developed a tremendous body of CV research and deployments since the allocation of dedicated communications for ITS safety and mobility applications. While it is not practical here to provide a complete survey of the research and development, this section provides summary descriptions and references for some prominent initiatives and programs.
USDOT Safety Pilot
The Connected Vehicle Safety Pilot Program was a scientific research initiative to make a real-world implementation of connected vehicle safety technologies, applications, and systems using everyday drivers. The effort, which began in 2011 and lasted through the summer of 2013, tested performance, evaluated human factors and usability, observed policies and processes, and collected the empirical data needed to present a more accurate and detailed understanding of the potential safety benefits of these technologies.32 This empirical data was critical to supporting the 2014 NHTSA decision on vehicle communications for safety.
The Safety Pilot Program included the following two components: the Safety Pilot Driver Clinics and the Safety Pilot Model Deployment.
Safety Pilot Driver Clinics
Between August 2011 and early 2012, the clinics began to test V2V safety applications with ordinary drivers in controlled roadway situations. The evaluations, conducted by CAMP, a consortium of light-vehicle manufacturers, explored driver reactions to these safety applications in a variety of light-duty vehicles and under various test conditions. The clinics were conducted at six sites across the United States. The clinics were to help determine whether the new applications create any unnecessary distractions for motorists. Approximately 100 drivers participated in each driver clinic.
Safety Pilot Model Deployment
To continue the data collection under real-world conditions, a test site in Ann Arbor, MI, was selected to host approximately 2,800 vehicles equipped with V2V devices. The goal was to create a highly-concentrated, connected vehicle communications environment. The devices tested included embedded and aftermarket devices and a simple communications beacon. All of these devices emit a basic safety message 10 times per second, which forms the basic data stream that other in-vehicle devices use to determine when a potential conflict exists. When this data is further combined with the vehicle's own data, it creates a highly accurate data set that is the foundation for cooperative, crash avoidance safety applications. Using a mix of cars, trucks, and transit vehicles, the Safety Pilot Model Deployment created test data sets for determining the technologies' effectiveness at reducing crashes. These capabilities will also be extended to a limited set of V2I applications. Supported by a diverse team of industry, public agencies, and academia, the Model Deployment ran from the summer of 2012 to the summer of 2013. An online video describing the Safety Pilot Model Deployment can be found at http://safetypilot.umtri.umich.edu/index.php?content=video.
USDOT Connected Vehicle Pilot Deployment Program
The vision for the USDOT’s Connected Vehicle Pilot Program is to "spur innovation among early adopters of connected vehicle application concepts using the best available and emerging ITS and communications technologies."33 The program goals are to accelerate an early deployment of connected vehicle technology, understand and estimate the benefits and impacts associated with deployment, and identify and solve key issues related to the technical and institutional barriers.
In September of 2015, the USDOT selected the following three pilot sites: New York City, Wyoming, along its I-80 corridor; and Tampa, Florida. Each site spent 12 months developing a deployment concept and 24 months to design, build, and test deployment of the CV technologies described in their concepts. In late 2018, the sites began a third phase of operations for monitoring system impacts against key performance measures. More information on these sites and the lessons learned is being published on a regular basis by USDOT at https://www.its.dot.gov/pilots/index.htm.
Smart Cities - Columbus
In December of 2015, USDOT launched its Smart City Challenge, "asking mid-sized cities across America to develop ideas for an integrated, first-of-its-kind smart transportation system that would use data, applications, and technology to help people and goods move more quickly, cheaply, and efficiently. The Challenge generated an overwhelming response: 78 applicant cities shared the challenges they face and ideas for how to tackle them."34 Seven finalists worked with the DOT to further develop their ideas, and the City of Columbus, Ohio, was selected as the winner. Connected vehicle technologies and applications were key enablers of the Smart Columbus solution.35
Connected Vehicle Pooled Fund Study
The Connected Vehicle Pooled Fund Study36 (CV PFS) was formed by Federal, State, local, and international transportation infrastructure owner-operators (IOOs) in 2009, "to aid transportation agencies and OEMs [original equipment manufacturers] in justifying and promoting the largescale deployment of connected vehicle environment and applications through modeling, development, engineering and planning activities."37 The CV PFS has sponsored research, development, deployment, and evaluation of CV application in 13completed projects and has four projects underway as of 2020. Current efforts include the following:38
- V2I Queue Advisory/Warning
- Using Third-Party Data to Deliver V2I
- Multi-modal Intelligent Traffic Signal System - Phase III: Deployment Readiness Enhancements
- Creation of a Guidance Document for MAP Preparation
More information on the CV PFS, its current efforts, and work plans can be found at https://engineering.virginia.edu.
Cooperative Automated Transportation (CAT) Coalition
"The Cooperative Automated Transportation (CAT) Coalition serves as a collaborative focal point for Federal, State and local government officials, academia, industry and their related associations to address critical program and technical issues associated with the nationwide deployment of connected and automated vehicles on streets and highways. Coalition membership includes representation from infrastructure owners and operators (IOOs), OEMs, technology and service providers, and Internet of things (IOT) suppliers."39 The CAT Coalition is collaboratively sponsored by the American Association of State Highway and Transportation Officials (AASHTO), ITS America, and ITE.
The CAT Coalition works through seven working groups, providing focus on programmatic and strategic activities; planning, scenarios, and resources; and infrastructure and industry. The working groups have sponsored numerous studies and initiatives to aid CV deployments. Technical resources produced by CAT Coalition working groups are available at https://transportationops.org/CATCoalition/resources.
SPaT Challenge
In 2015, the CAT Coalition issued the SPaT Challenge40 as means of equipping and seeking the commitment of US IOOs to deploy V2I infrastructure with SPaT and MAP message broadcasts in at least one corridor or network—about 20 signalized intersections—in each of the 50 States by 2020. The program also developed informational and technical resources to support these deployment commitments. Applications intending to use SPaT and MAP messages in these deployments include transit and snow plow signal prioritization, red light violation warning, spot weather warnings, and vehicle-to-pedestrian warnings. More information is available at https://transportationops.org/spatchallenge.
CV Deployments in the United States
The number of CV deployments across the United States has made it difficult to maintain awareness of the variety of applications and technologies being deployed. USDOT has compiled an interactive map and database of CV operational and planned deployments to provide that overview.41 The Interactive Connected Vehicle Deployment Map tool, available at https://www.transportation.gov/research-and-technology/interactive-connected-vehicle-deployment-map, also provides a state-by-state view of economic costs that might be mitigated in potential CV deployments.
NCHRP 20-102
The Transportation Review Board (TRB) NCHRP Project 20-102 on Impacts of Connected and Automated Vehicles on State and Local Transportation Agencies42 has developed a significant body of fundamental research. Its objectives are to identify, conduct, and disseminate findings in CV and AV research for IOOs. Reports produced under this project43 have addressed topics as varied as business models, data management, planning guidance, and laws and regulations. More information is available at https://apps.trb.org/cmsfeed/TRBNetProjectDisplay.asp?ProjectID=3824.
Connected Intersections
Connected vehicle technologies have largely achieved interoperability through development and application of standards to equipment and software. Some level of standard practices will also be necessary to achieve a consistent deployment of CV applications and infrastructure across the US. Original equipment manufacturers and vehicle owners will have an expectation that CV applications deployed in those vehicles are broadly and reliably available as they operate around the country.
The Institute of Transportation Engineers and partner associations including the USDOT, AASHTO, IEEE, SAE, and the National Electrical Manufacturers Association (NEMA) are developing standards and recommended practices for deployment of connected intersections.44 Stakeholders from among IOOs, OEMs, fleet operators, safety advocacy groups, multimodal partners, and others are providing perspectives and information to the systems engineering process for these developing connected intersection standards. More information is available at https://www.ite.org/technical-resources/standards/connected-intersections/.
International Harmonization
Recognizing that development and deployment of CV applications extends across international borders, the USDOT collaborates with other institutions including governments, industry associations, experts, and standards development organizations (SDOs) to support those efforts.
- Shared research leads to a broader base of expertise, a larger and more detailed set of results, and more effective use of research resources.
- Common hardware and software can reduce development and manufacturing costs.
- Improved interoperability across borders can enhance safety and commerce.
- Facilitation of a global marketplace can accelerate deployment of new technologies.
As such, USDOT collaborates with multiple SDOs working on ITS and related standards to facilitate harmonization when in the public interest. These relationships fund experts and State and local participants to identify requirements in standards working groups, as appropriate. United States Department of Transportation cooperates with the International Organisation for Standardization (ISO) as well as domestic SDOs, including IEEE, SAE, AASHTO, and NEMA; USDOT also maintains working relationships with the European Telecommunications Standards Institute (ETSI) and observer status with the European Committee for Standardization (CEN).
In addition to relationships with SDOs, the USDOT maintains important cooperative agreements with other countries in support of harmonization efforts. The Implementing Arrangement with the European Union (EU) has formed the basis of much of the USDOT’s work in international harmonization, and has provided additional means for multilateral efforts with other nations. Agreements and informal cooperation between the USDOT and Australia, Japan, and Korea permit information exchanges and research collaborations on select standards working group activities. The SDOT also collaborates with Canada on various standards activities related to border interoperability under a long-standing agreement.
Return to top ↑
Summary
- The connected ecosystem uses wireless connectivity among vehicles, the infrastructure, and mobile devices to bring about transformative changes in highway safety, mobility, and the environmental impacts of the transportation system.
- The vision of a national multimodal connected ecosystem requires participation of a broad community of the following stakeholders: Federal, state, and local transportation agencies; car, truck and bus manufacturers; telecommunications providers and consumer electronics manufacturers; transportation information service providers; and researchers.
- Benefits from the connected ecosystem are expected to accrue in a number of the following areas:
- Combined use of V2V and V2I communications to address crashes in all vehicle types
- CV systems to reduce urban traffic congestion, travel delays, and vehicle emissions as well as improve vehicle fuel efficiency
- Applications enable the CV systems and technologies to deliver services and benefits to users. Applications are the most visible part of the connected ecosystem.
- Connected vehicle applications are typically divided into the following seven broad categories, with each category comprised of bundles of individual applications:
- V2V safety
- V2I safety
- Mobility
- Environmental
- Road Weather
- Agency Data
- Smart Roadside
- The connected ecosystem will require the deployment of technologies on vehicles and across the following infrastructure systems:
- Connected vehicles, their sensors, and on-board equipment for communications and application processing
- Connected infrastructure, in roadside equipment, management centers, and information services
- Communications among all potential user devices, in both low latency local and wide area network connections
- Standards for message exchange and content
- Successful CV application deployment has required collaboration among the connected ecosystem stakeholders including Federal, state, and local transportation agencies; vehicle manufacturers and technology industries; researchers in academia and industry; standards development organizations; and professional and industry associations.
- Strategic challenges remain in development and deployment of CV applications and technology:
- Consistent application of cybersecurity practices across the connected ecosystem
- Demonstration of CV application benefits in real-world deployments
- Programmatic planning and investment for CV infrastructure
Return to top ↑
References
Return to top ↑